基于ESP32的多功能智能运动控制平台
项目概述
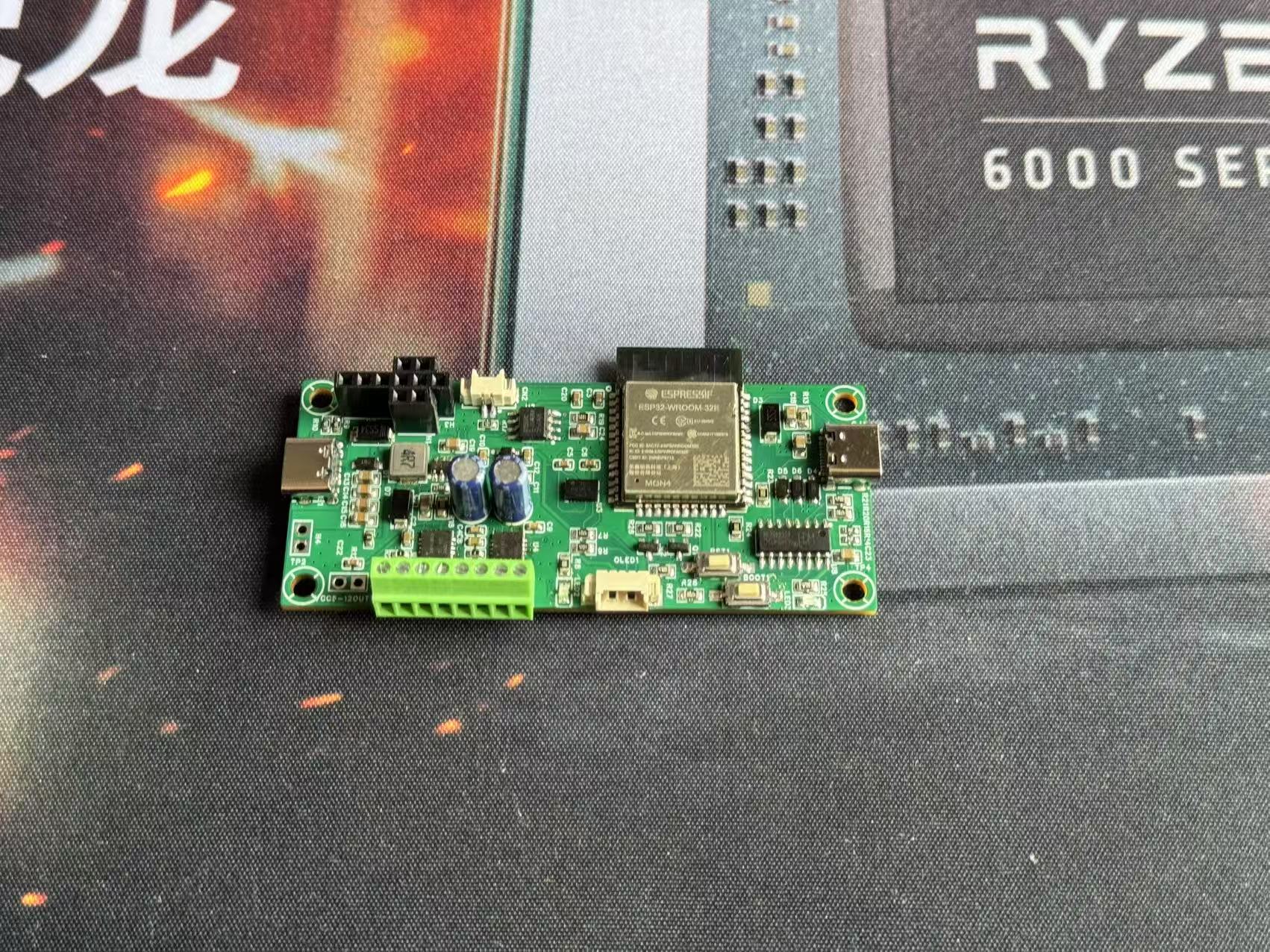
本系统是一款高度集成化的智能运动控制开发平台,采用ESP32作为核心控制器,配备双DRV8833电机驱动芯片、高精度BMI088惯性测量单元(IMU)和2.4GHz无线通信模块。系统可同时控制4路直流有刷电机或2路步进电机+2路舵机,配合16位高精度陀螺仪和加速度计,实现精准的运动控制和惯性导航功能。平台提供完整的运动控制算法库和开发框架,适用于机器人、智能小车等运动控制领域的快速原型开发。
核心功能亮点
强大的运动控制能力
- 双DRV8833驱动,单路持续输出电流1.5A(峰值2A)
- 支持4路PWM调速控制(频率1-40kHz可调)
- 集成2路舵机控制接口(0.5-2.5ms脉宽)
- 步进电机细分驱动(最大1/16微步)
高精度姿态感知
- BMI088 IMU:16位陀螺仪(±2000°/s)
- 三轴加速度计(±24g)
- 内置温度补偿算法
- 1000Hz数据采样率
智能控制与通信
- 2.4GHz无线遥控(最大传输距离100米)
- 蓝牙/Wi-Fi双模通信
- OTA远程升级支持
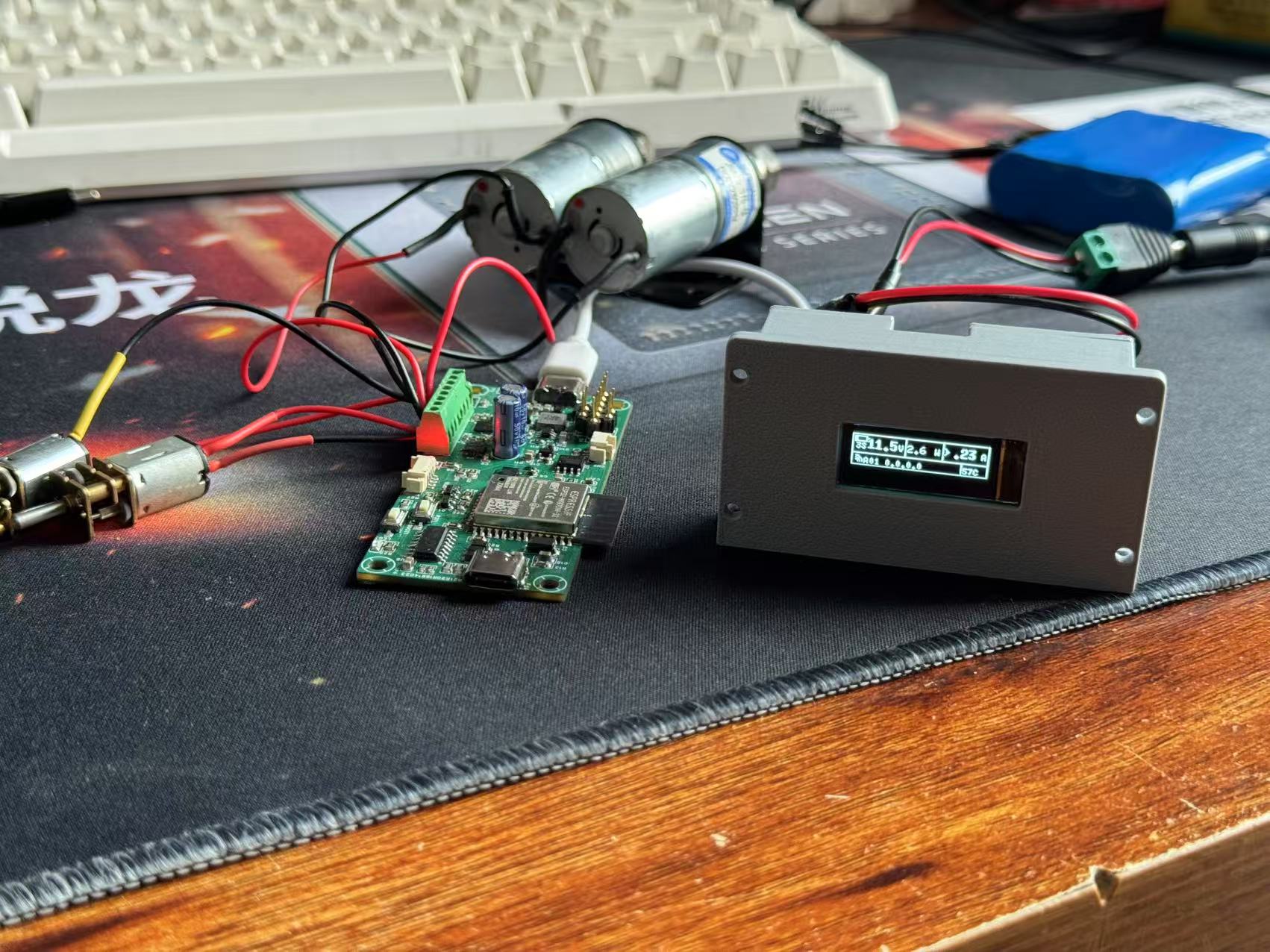
- 实时运动状态反馈
技术特色
- 自适应PID运动控制算法
- 卡尔曼滤波姿态解算
- 运动轨迹记录与回放功能
- 低功耗模式(待机电流<10mA)
- 模块化扩展接口(I2C/SPI/UART)
典型应用场景
教育开发平台
- 平衡小车快速入门套件
- 机器人运动控制实验平台
- 惯性导航算法验证平台
智能移动机器人
- 麦克纳姆轮全向移动平台
- 三轮全向轮配送机器人
- 自动循迹运输小车
创新应用
- 自平衡独轮车/两轮车
- 智能跟随行李箱
- 遥控竞技机器人
项目优势
该平台通过一体化设计,集成度高,显著降低了开发难度。同时提供完整的运动控制算法库,支持多种通信协议,便于二次开发。平台拥有丰富的扩展接口,可连接多种传感器,并提供完善的开发文档和示例代码,帮助开发者快速实现复杂的运动控制项目。
使用技术
ESP32
运动控制
DRV8833
BMI088 IMU
2.4GHz通信
PID算法